Research on Measurement Method of Leaf Length and Width Based on Point Cloud


信息与电气工程学院,中国农业大学,北京市海淀区清华东路 17 号,100083 中国
工程实践创新中心,中国农业大学,清华大学东路 17 号,海淀区,北京 100083,中国
收信人作者
提交日期:2020 年 12 月 1 日 / 修订日期:2021 年 1 月 8 日 / 接受日期:2021 年 1 月 11 日 / 发表日期:2021 年 1 月 13 日
Abstract
叶子是植物生长中与光合作用和蒸腾作用相关的重要器官。通过研究叶片表型,可以理解由形态参数与环境相互作用产生的生理特征。为了实现叶片空间形态的评估,引入了一种基于三维立体视觉的方法来提取形状信息,包括叶片的长度和宽度。首先,使用深度传感器收集植物叶片的点云。然后,通过主成分分析调整叶片坐标系以提取感兴趣区域;并与横截面法、测地线距离法相比,我们提出了一种基于切割平面的方法来获得三维叶片模型的交线。使用茄子叶片来比较这些方法在单叶测量中的准确性。
1. Introduction
随着 3D 技术的快速发展,三维测量技术的研究已应用于动物体型的自动重建,如猪[22, 23]、羊[24]和牛[25]。人体尺寸的测量发挥着重要作用,3D 扫描技术已被用于非接触式自动测量人体尺寸[26],例如,刘等[27]和谭等[28]通过地理距离的随机森林回归分析提取特征点和线,获得了人体尺寸。张等[29]提出了一种基于测地距离的姿态估计框架。3D 技术还应用于土方工程[30]、水利[31]和其他复杂地形问题,以实现重建和测量。在当前研究中,图像分析被用于量化作物特征,这对于新品种的市场化至关重要[32, 33]。周等[34]使用无人机获得了倒伏玉米的三维结构数据。郭[35]、贡加尔[36]和杨等。 [ 37] 重建苹果树树冠并基于 3D 相机提取苹果直径。使用 3D 点云测量植物叶片信息已成为科学研究的崭新领域。在植物生长监测中,准确且非破坏性的测量植物结构参数非常重要,张等[ 38]开发了一种多摄像头摄影系统,并测量了 3D 苗圃辣椒植物模型的六个变量。冯等[ 39]基于光度立体视觉确定了法向量的分布并拟合了叶片的空间平面。张等[ 40]用激光片垂直扫描植物并获得了样品的点云结构。板仓等[ 41]通过距离变换在俯视图图像中分割叶片,并利用 3D 信息通过流域算法扩展种子区域。胡等[ 42]提出了一种基于流形距离和法向估计的叶片 3D 点云滤波方法,并指出两点之间的距离不能很好地反映所有流形相似性,而测地线曲线更好地反映了这两点之间的相似性。 可以看出,横断面法和大地测量距离法是三维长度测量中最常用的方法。叶片是一个具有空间属性的科研对象,因此我们比较横断面法和大地测量距离法来测量叶片在三维模型上的长度和宽度。该方法在横断面法的基础上进行了改进,以便快速获得交线。
2. Materials and Methods
2.1. Acquisition the RoI of Leaf Point Cloud Model
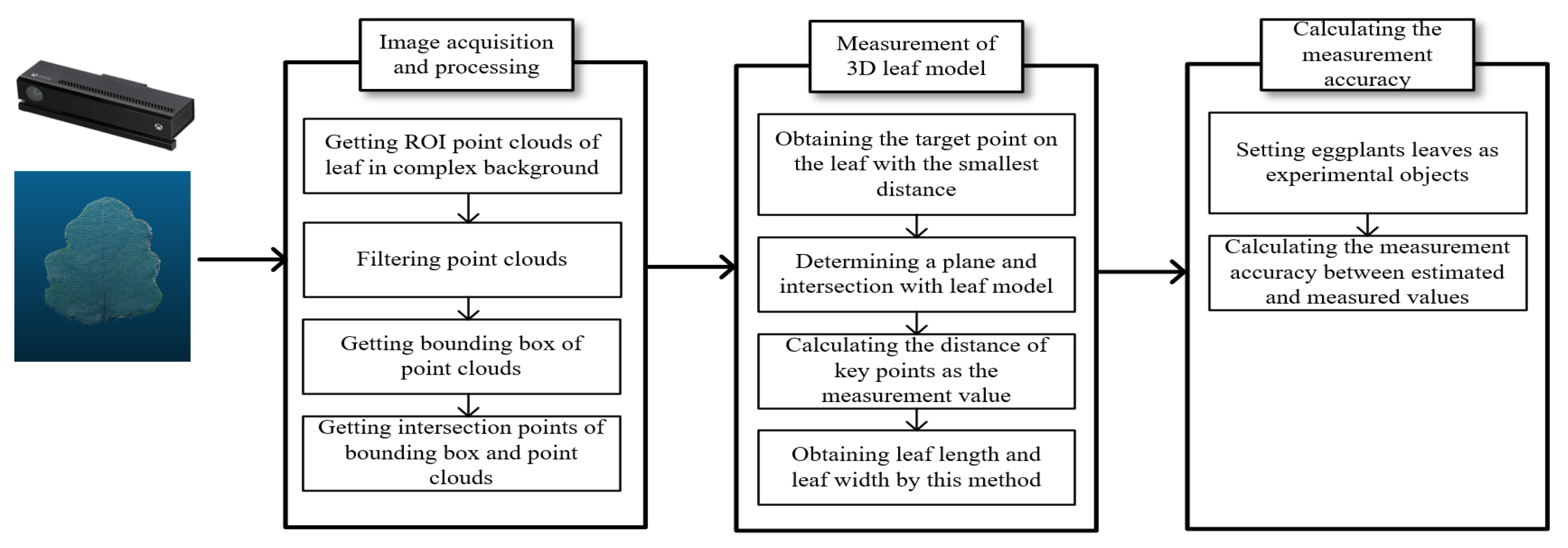
Kinect2.0 用于拍摄茄子并获取相应的点云以获取完整的场景信息。场景信息包含整个植物,研究对象是叶片的长度和宽度,因此手动选取了无遮挡的完整叶片点云作为实验对象。长度测量不包括叶柄长度,因此手动移除了叶柄以确保测量的准确性。在此,选择茄子叶片作为研究对象以证明测量叶片长度和宽度的有效性。提取的叶片点云信息包含噪声,因此使用了点云库提供的[43]滤波方法和[44]平滑算法对图 1 中的点云进行处理。

当收集数据时,Kinect2.0 与拍摄场景的距离小于 1.1 米,这可以增加叶片上点云的密度。移除了场景点云的无用部分,仅获得了单片叶片的信息,这可以确保叶片信息的完整性。由于本文的重点是对比测量植物上单片叶片的测地线距离法、横截面法和改进方法,因此没有重建植物点云。
每个叶片的点云网络定义为 P,包括一系列三维点作为节点, 。通过 3D 相机获得的原始植物点云的主方向 是任意的,测量的关键点无法自动获得。在本文中,为了实现统一和自动的关键点,叶片的方向被归一化,并在宽度方向和长度方向的关键点底部自动获得了两个关键点。主成分分析(PCA)是一种提取主要特征对的方法,可以从多个维度分析主要影响因素。PCA 算法被用来获取点云数据的主轴,在此轴上数据分布的方差最大。点云数据分别被投影到由这三个轴形成的新坐标系中。它主要用于降维和提取数据的主要特征成分[45]。PCA 是依次从原始空间中找到一个相互正交的坐标轴集合。 新坐标轴的生成与叶子的原始点云数据密切相关。其中,主轴选择是原始数据中变异性最大的方向。次主坐标轴选择是为了最大化与第一坐标轴垂直的平面上的变异性。第三主轴在第一和第二轴垂直的平面上具有最大的变异性。主成分分析(PCA)的实现方法如下:首先,找到点云的中心。对于输入点集 P,点云数量为 n,则中心点 为方程(1)
其次,通过奇异值分解[47]计算协方差矩阵 的特征向量。由于矩阵 的特征向量彼此垂直,可以用作边界框的方向轴[48]。将封闭聚合顶点投影到轴上,以找到每个轴的投影区间。方差越大,点云在此轴上的投影分布越分散,轴上的投影区间越长。
假设叶长距离大于叶宽,使用主成分分析(PCA)确定叶片的主直径轴 ,u 为叶长轴,v 为叶宽轴,w 为厚度轴。叶片的边界框基于 坐标系构建,u 和 v 方向上与边界框相切的点为所需的关键点。
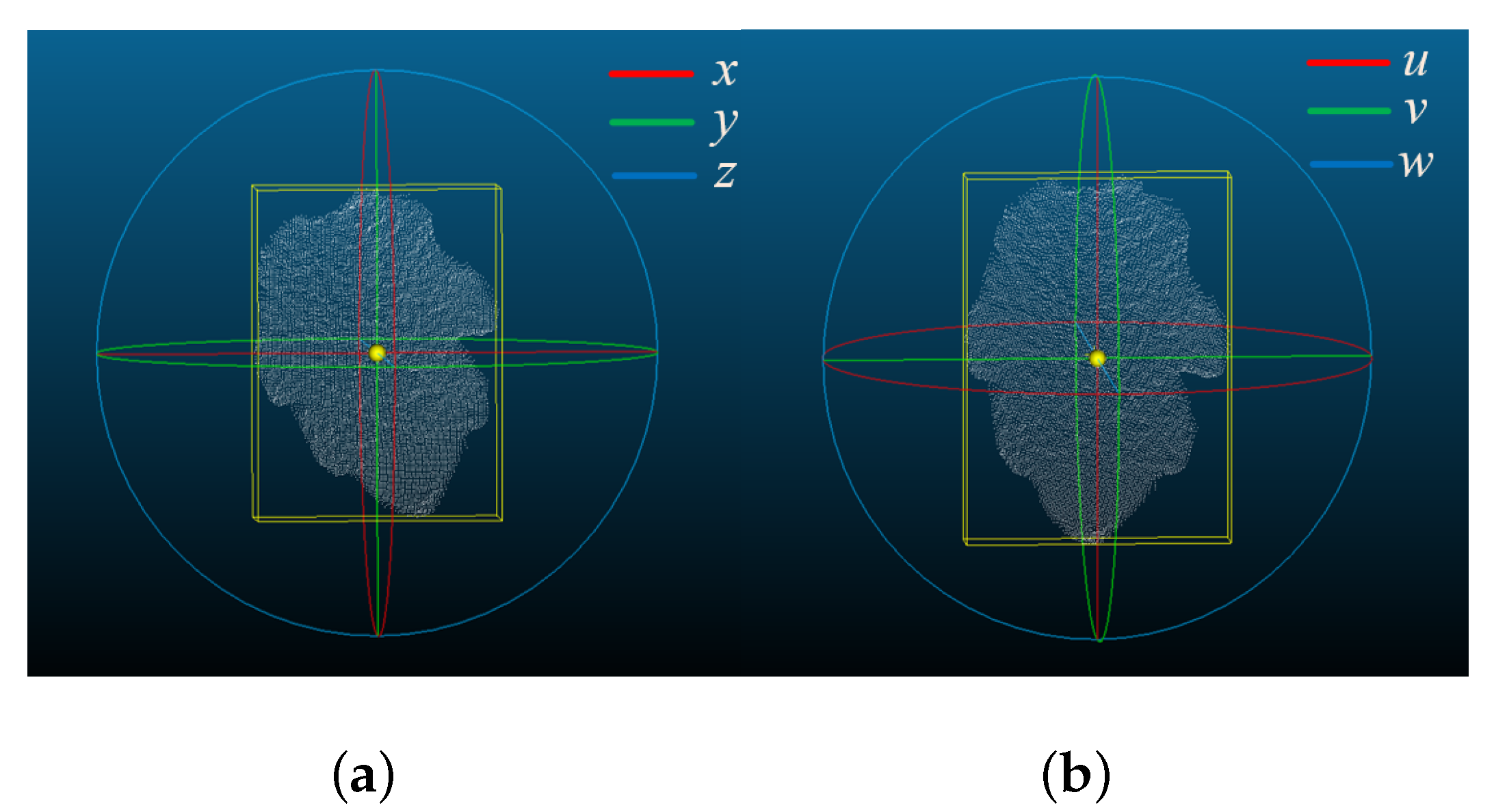
在获得坐标系后,提取了边界框和叶点云的交点,这些点代表叶扩展的最大值,并作为测量长度和宽度的关键点。图 2a 表示原始点云的坐标系,其中红色直线是 x 轴,绿色线是 y 轴,蓝色线是 z 轴;图 2b 表示经过 PCA 处理后的点云坐标系,其中红色直线是 u 轴,绿色线是 v 轴,蓝色线是 w 轴。假设叶长大于叶宽,u 为主轴,v 为次主轴,w 为第三主轴。图 2 中 3D 叶模型的黄色边界是通过边界框方法获得的。与边界框在 v 轴相交的点为叶宽的测量点,命名为 , 。边界框的 u 轴与叶底相交的点为 ,而叶长另一侧的点不能直接用作叶尖的点。 由于茄子叶柄位于点云的凹面,因此包围盒与 u 轴相交的点不是叶柄,所以需要手动选择 点。

图 2. 叶点云坐标系。(a)点云原始坐标系。(b)点云处理后的坐标系。
在图 3a 中,原始点云被投影到 坐标系中,图 3b 中重建的点云被投影到 坐标系中。使用 PCA 算法处理点云,并将元素映射到主坐标轴、次主坐标轴和三级主坐标轴。重建点云的坐标轴具有规律性,这与叶片长度、宽度和厚度的投影密度降低有关。因此,重建的主坐标轴 u 代表叶片长度,次主坐标轴 v 代表宽度,三级主坐标轴 w 代表厚度。

图 3. 点云数据在坐标系上的投影。(a)原始坐标系下点云的分布图 。(b)重建坐标系下点云的分布图 。
算法 1 使用了 PCA 算法重构坐标系统 ,以获取叶子的感兴趣区域(RoI)以及长度和宽度的关键点。
| Algorithm 1 The algorithm of obtaining the measurement points of length and width. 算法 1 获取长度和宽度测量点的算法。 |
| Require: for i = 1:n do Calculate by Equation (1) end for Calculate covariance matrix by Equation (2) Calculate eigenvalues and eigenvectors of , and express eigenvectors as the coordinate system , Calculate the minimum bounding box for the leaf model in the coordinate system , Define the reconstructed point cloud as , Define the intersection point of the leaf model and the bounding box in v direction as , , Define the intersection point of the leaf model and the bounding box in u direction as , Define the intersection point of the leaf model in u direction as manually. Ensure: |
2.2. Measurement the Length and Width of Leaf
常用的三维长度测量方法有横截面和测地距离法。横截面法利用关键点和方向向量找到切平面。在本文中,根据边界框技术获得了关键点,长度平面和宽度平面垂直于 平面。纵向截面与叶长相交形成交线,该线的值用作叶长测量值。横截面与叶宽相交形成交线,该线的值用作叶宽测量值。获得的长宽切线是曲线,这与根据给定点从起点到终点在叶上获得曲线距离的实际测量方法一致。
测地距离法是一种启发式方法,其中必须提供测量的起点和终点,根据最短路径原理找到连接两点的线,例如 A* [49]、Dijkstra [50]测地距离法。Dijkstra 算法是一种典型的最短路径算法,用于计算从起始节点到最终节点的最短路径。Dijkstra 算法可以获得最短路径的最优解。对于路径上的当前点,A*算法记录到源点的成本和从当前点到目标点的预期成本,因此它是一种深度优先算法。A*算法常用的启发式函数包括曼哈顿距离、欧几里得距离和切比雪夫距离[51]。本文的研究对象是 3D 点云,在寻找下一个目标点时可以沿任何方向移动,因此本文选择欧几里得距离作为 A*算法的启发式函数。点之间的空间距离是最短距离的基础。 起始和终止关键点与横截面方法相同,叶子的长度和宽度通过起始和终止关键点计算,因此在寻找最短路径时,相邻点 和点 之间存在波动。
在这篇论文中,基于横截面法,截面方向并非垂直于坐标系,而是根据叶子上离起点和终点最近的点构建平面。本文提出使用切割平面法获取叶子交线作为测量长度和宽度的基础。对于叶子长度,获得了起点 和终点 ,但确定一个平面需要三个不在同一直线上的点,因此需要第三个点来构建三维平面。同样,对于叶子宽度,通过边界框技术获得了起点 和终点 ,也需要第三个点来构建宽度平面。本文提出的方法不是根据垂直于坐标系的点云 来计算叶子的长度和宽度,可以省略坐标系转换的过程。 需要指定起点和终点来计算叶点云的目标点,然后确定长度和宽度的切平面。
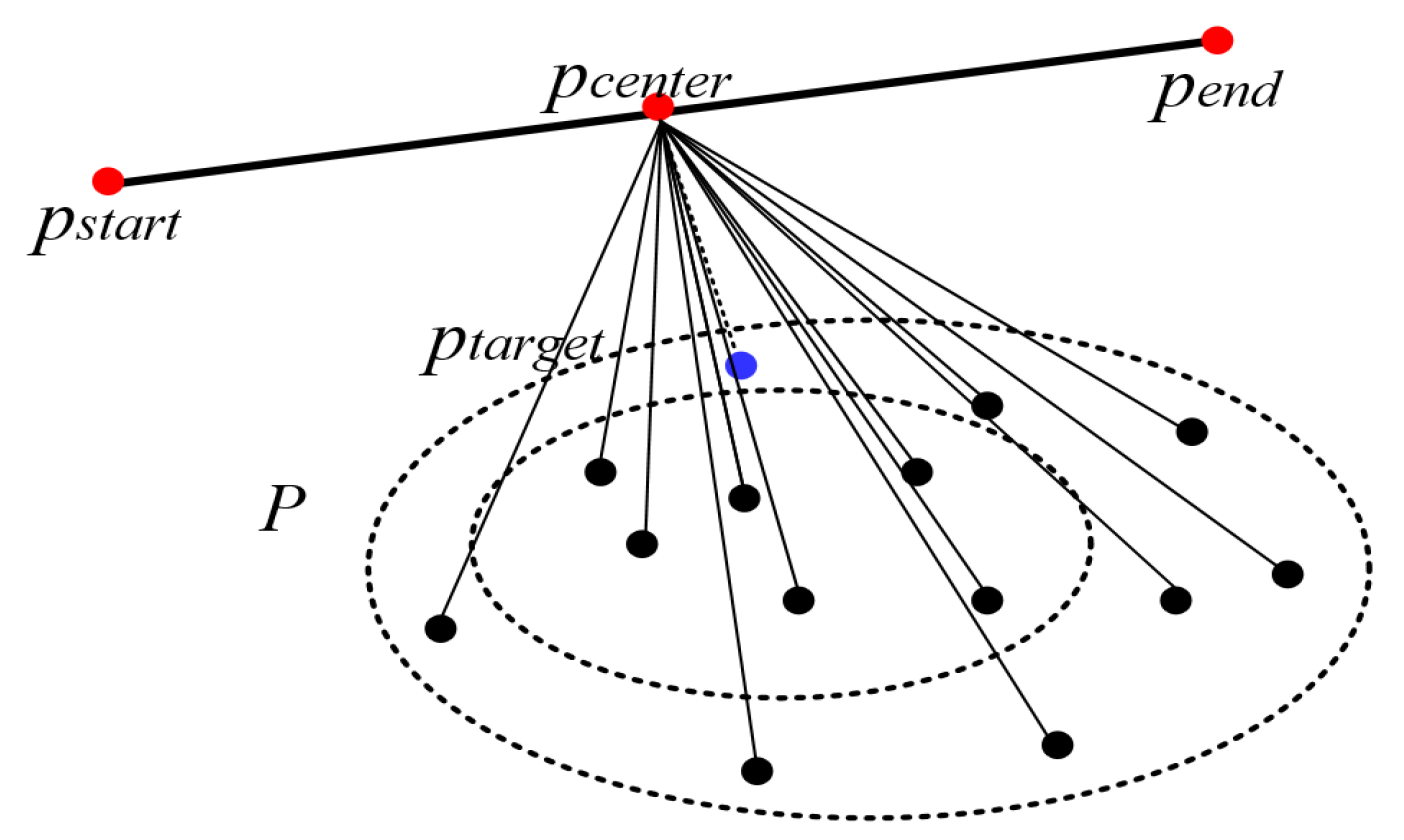
为了获得第三点,将起点 和终点 之间的线段中点设为方程(3)中的 。在叶点云上选择距离 最近的点作为方程(4)中切割平面上的第三点 。以这种方式选择的靶点 可以确保与点 的距离最近,而三个点 、 和 构成了三维叶模型构成的平面。
在式中, 表示 和 之间距离最小的点的坐标,d 表示两点之间的欧几里得距离。类似地,在计算宽度切平面时,方程(5)中的起点 和终点 之间的线段中点为 。在方程(6)的叶模型中,选择距离 最近的点作为 。
在图 4 中,红色点分别代表 、 和 ,而黑色点代表 3D 叶片模型。距离 最近的点被选为 ,用蓝色表示。

对于叶片长度的部分,点 、 和 在同一直线上,而点 、 和 不在同一直线上,因此根据平面方程,可以保证这三个点确定一个平面。对于宽度部分,点 、 和 不在同一直线上,因此可以保证三个点定义一个平面。这个过程是为了比较点集 和 之间的距离,并选择对应最小距离的点 p 作为点 。目的是通过一条直线和一个点确定一个平面,并通过平面和叶片点云表面切割一条曲线。
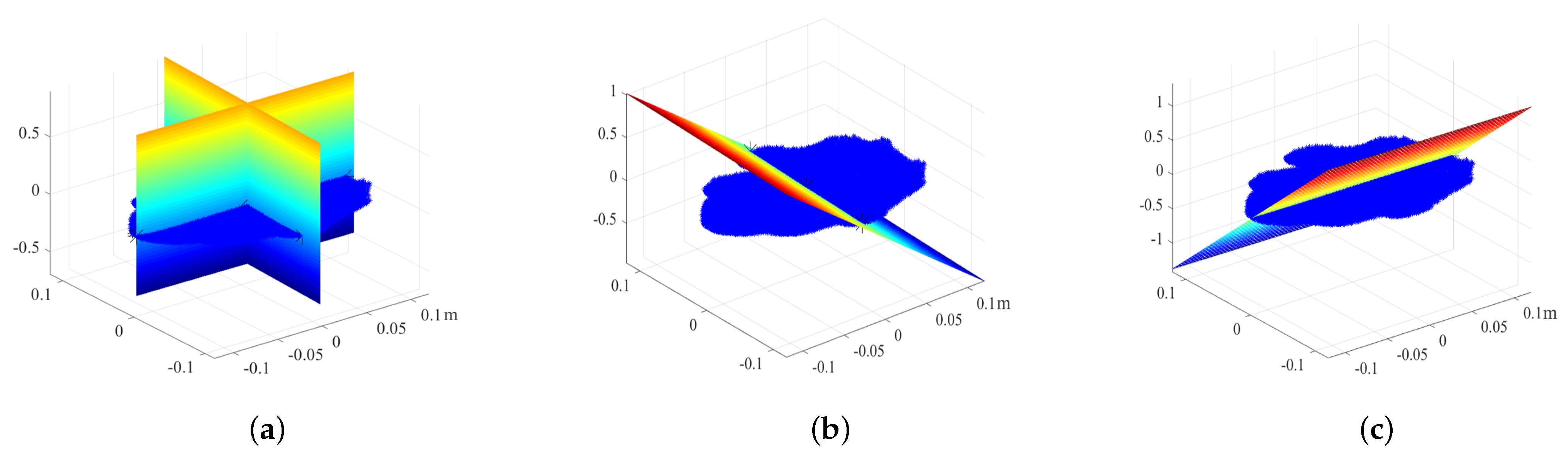
图 5a 显示了通过传统横切法获得的叶片长度和宽度部分,坐标系统根据主成分分析(PCA)方法重建,长度和宽度平面垂直于坐标平面 。对于宽度部分,假设方程为 。通过方程中不在同一直线上的三个点 、 和 确定的平面 。叶片的横切面在图 5b 中显示。假设长度平面方程为 。通过方程中不在同一直线上的三个点 、 和 确定的平面 是叶片长度的切平面。图 5c 中显示了与叶片长度相交的截面线,如 。类似地,截面线与叶片宽度相交,如 。

图 5. 获取叶片的空间长度和宽度平面。(a)通过横切法获得的长度和宽度空间平面。(b)根据本文获得的宽度空间平面。(c)根据本文获得的长度空间平面。
该文获得的长度和宽度切割平面与坐标平面不垂直。我们方法的核心是利用切平面切割模型,并将交线上的点作为计算长度和宽度的基础。叶模型与长度和宽度平面相交,这些平面用于在算法 2 中测量长度和宽度。
| Algorithm 2 The algorithm of calculating leaf length and width. 算法 2 计算叶长和叶宽的算法。 |
| Process of calculating leaf length 计算叶片长度的过程 Require: 需要: Calculate the midpoint of line using Equation (3). 计算直线 的中点 ,使用公式(3)。 for i = 1:n do 对于 i = 1 到 n 循环 Calculate the distance between and as , 计算 与 之间的距离为 , Find , and the keypoint using Equation (4). 找到 ,并使用公式(4)确定关键点 。 end for Calculate the cutting plane of as , 计算 的切割平面为 , Define the tangent point set of leaf model and cutting plane as the length. 定义叶模型切点集和切割平面的长度。 Ensure: 请提供需要翻译的源文本,以便我进行翻译 tangent point set 切点集 Process of calculating leaf width 计算叶片宽度过程 Require: 需要: Calculate the midpoint of line using Equation (5). 计算直线 的中点 ,使用公式(5)。 for i = 1:n do 对于 i = 1 到 n 循环 Calculate the distance between and as , 计算 与 之间的距离为 , Find , and the keypoint using Equation (6). 找到 ,并使用公式(6)确定关键点 。 end for Calculate the cutting plane of as , 计算 的切割平面为 , Define the tangent point set of leaf model and cutting plane as the width. 定义叶模型的切点集和切割平面为宽度。 Ensure: 请提供需要翻译的源文本,以便我进行翻译 tangent point set 切点集 |

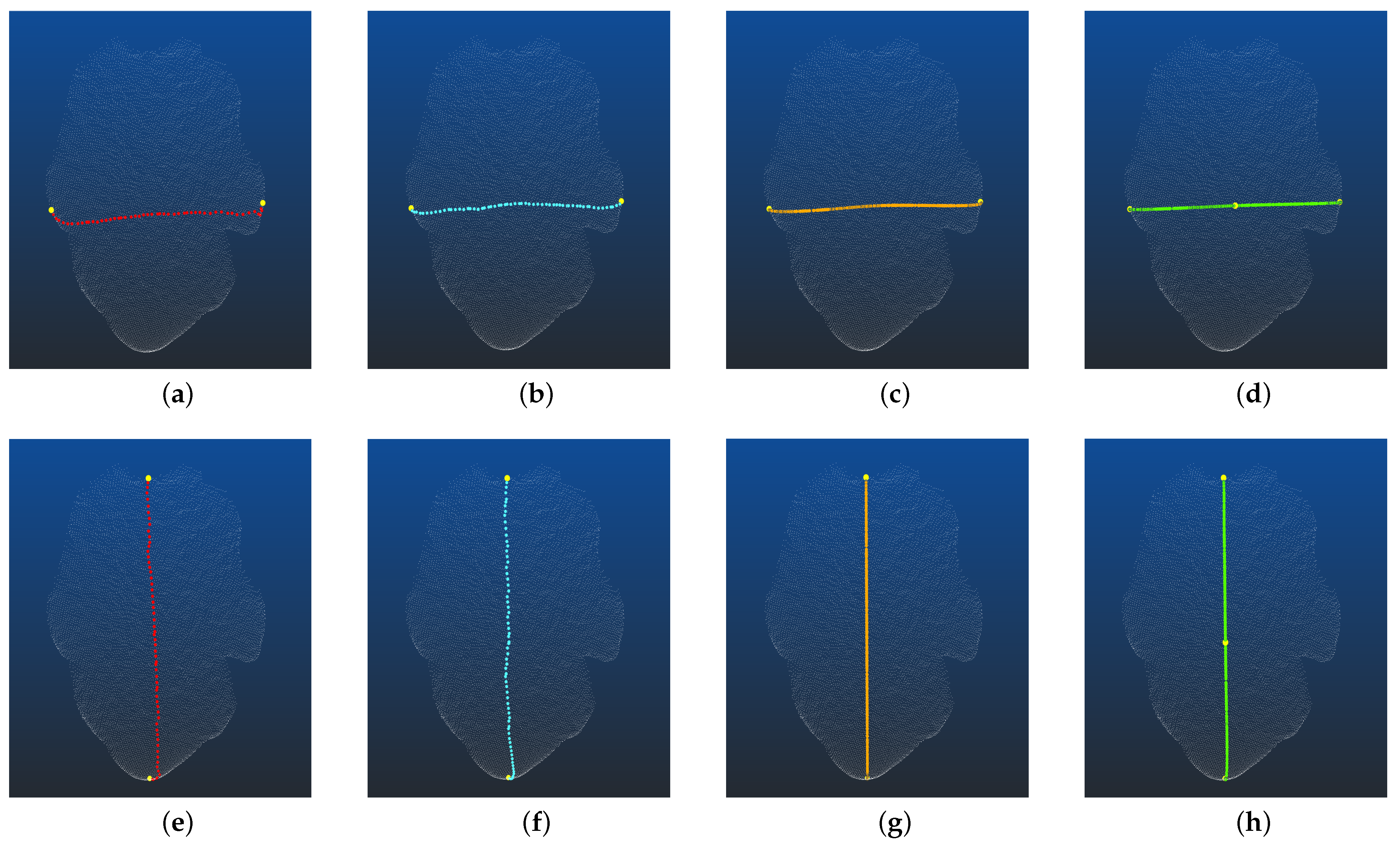
图 6. 获取叶长和叶宽的点集。(a)通过 A*算法获取宽度关键点集。(b)通过 Dijkstra 算法获取宽度关键点集。(c)通过截面算法获取宽度关键点集。(d)通过我们的方法获取宽度关键点集。(e)通过 A*算法获取长度关键点集。(f)通过 Dijkstra 算法获取长度关键点集。(g)通过截面算法获取长度关键点集。(h)通过我们的方法获取长度关键点集。
大地测量距离法、横截面法和本文的方法具有相同的起点和终点。A*算法和 Dijkstra 算法得到的所有点都在原始点云上,根据叶模型中每一点之间的距离获得从起点到终点的最短距离。因此,大地测量距离法需要更多时间,Dijkstra 算法的时间复杂度为 [ 52]。横截面法和本文的本质是将横截面与模型的交点作为关键点。横截面法获得平面的原理基于起点、终点和垂直于坐标平面的向量。本文的原理基于起点、终点和目标点。因此,在图 6d、h 中,有黄色圆点标记的起点、终点和目标点。
3. Results
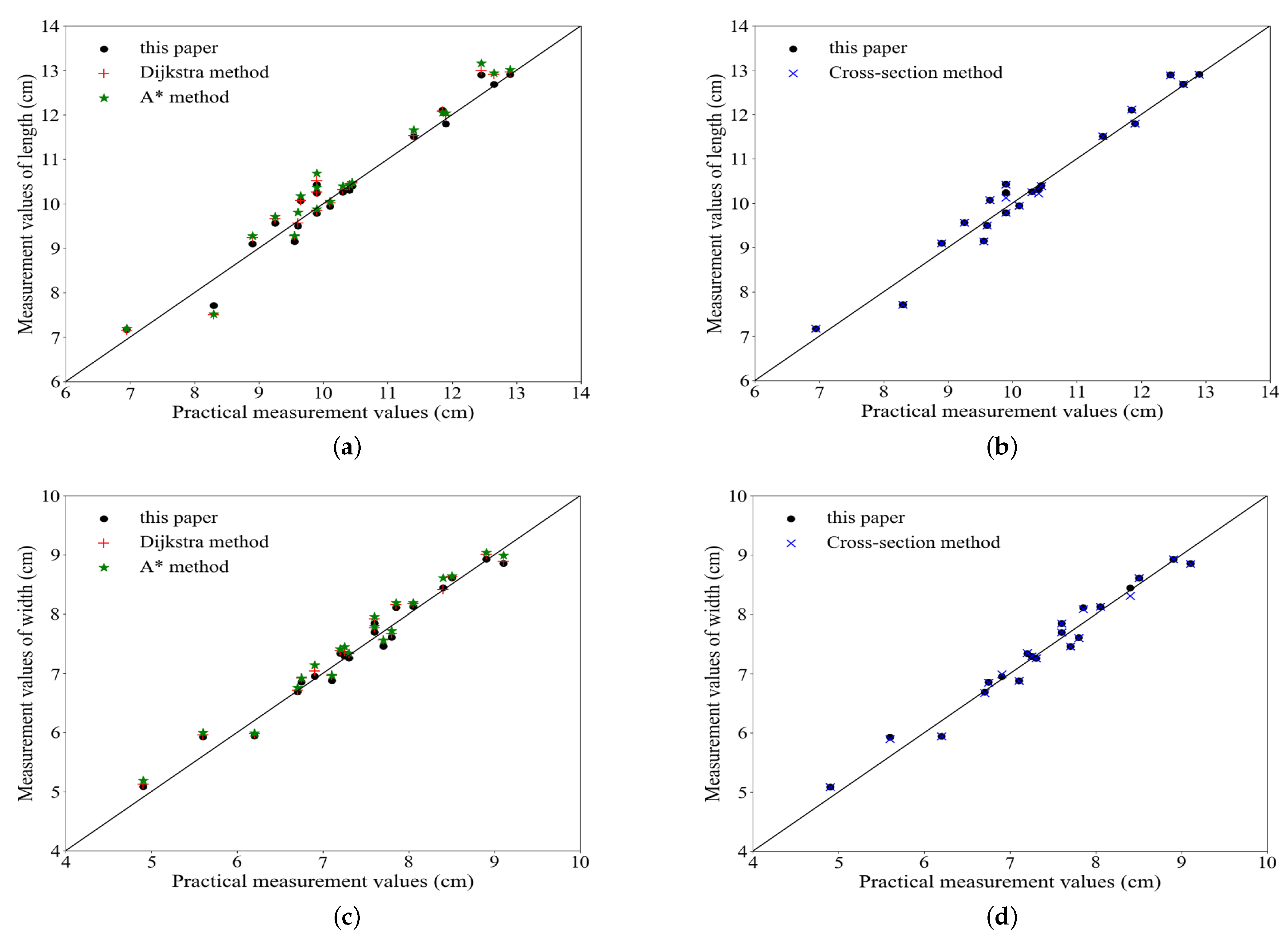
在这篇论文中,选取了 20 个三维茄子叶片作为实验对象,并获得了每个模型的要点 、 、 和 。在获得要点 和 后,通过 A*、Dijkstra、横截面以及本文提出的方法计算长度和宽度。对于切割平面 的要点集,需要通过空间距离连接并测量两个相邻点 和 。图 7 显示了在特定实际测量值下,与 A*算法、Dijkstra 算法和横截面方法相比,我们方法测量长度(或宽度)的值。坐标轴的点代表算法获得的估计值,而水平坐标轴代表实际的宽度和长度值。从图 7a-d 可以看出,本文提出的方法与 A*、Dijkstra 和横截面方法进行了比较,并显示了与实际值的差异。

图 7. 算法测量的长度和宽度值与实际值的比较。(a)与本文关于叶片长度的测地距离方法的比较。(b)与本文关于叶片长度的横截面积方法的比较。(c)与本文关于叶片宽度的测地距离方法的比较。(d)与本文关于叶片宽度的横截面积方法的比较。
确定系数( )计算了 20 组数据,以比较每种方法的准确性,其中 A*方法计算出的长度与实际长度相比为 0.930;Dijkstra 方法计算出的长度与实际长度相比为 0.949;横截面方法计算出的长度与实际长度相比为 0.963;本文方法计算出的长度与实际长度相比为 0.962;A*方法计算出的宽度与实际宽度相比为 0.956;Dijkstra 方法计算出的宽度与实际宽度相比为 0.966;横截面方法计算出的宽度与实际宽度相比为 0.970;本文方法计算出的宽度与实际宽度相比为 0.970;与大地距离法和横截面法的误差相比,本文中测试的实际值均在研究的可接受范围内,因此这些方法可以用来测量叶片的长度和宽度。 但就时间复杂度而言,测地距离需要额外的时间来比较点之间的距离,因此横截法以及本文中的算法具有较低的时间复杂度。本文中的算法需要一次遍历来找到目标点,其时间复杂度为 。在算法复杂度方面,横截法需要重建坐标系以获得向量。本文中的算法基于不在同一直线上的三个点构建空间平面,无需重建坐标系的流程。本文的方法和横截法的精度高于测地距离法,因为选择最短路径时,测地距离法的所有点都必须在模型中。我们的方法与横截法类似,都是通过平面切割模型,关键点通过切线获得。
与二维图像相比,三维点云包含物体的空间信息。本文证明,大地测量距离法和横截面法也适用于三维叶片模型的测量。
4. Discussion and Conclusions
测地距离法是寻找从起始点到终点在原始点云上最短距离的关键点的过程。它使用点云上点之间的距离关系作为下一步获取最短距离的基础。Dijkstra 方法的时空复杂度为 [ 52],这与点的密度有关。为了提高算法的效率,进一步使用横截面法计算叶子的长度和宽度,该方法直接使用切平面切割点云以获得交点。然而,此方法规定切割平面必须垂直于坐标平面以获得尺寸信息,因此必须预先处理点云的坐标系。此外,还考虑了叶子上的点是否可以直接用来构建平面,因此根据公式(4)和(6)获得的起始点、终点和目标点被考虑用于构建平面方程。这个平面不需要垂直于坐标平面。 它使用点云信息以及横截面方法的简便性。
本文比较了常用的三维测量方法,如测地距离法和横截面法,并进一步提出了我们的算法。实验表明,测地距离法(A*,Dijkstra)、横截面法以及我们的方法可以用来计算叶子的实际长度和宽度。与横截面法相比,该算法进行了改进,因为它克服了横截面法必须重建坐标系的问题。我们的测量方法基于三个关键点直接获取截面,因此与测地距离法相比,它不需要花费很长时间和高空间复杂度来寻找最短路径。
Kinect2.0 用于采集叶片的点云,文章的实验部分没有涉及点云配准。因此,我们没有选择叶菜作为对象,因为叶菜的叶片相互遮挡,无法获得完整的叶片点云信息。此外,我们没有将卷曲的叶片作为对象,因为卷曲的叶片无法通过单一深度图像获得完整信息。研究重点是对比测地距离、横截面和改进方法,用于测量植物上的单个叶片,因此没有进行植物点云的重建,如运动结构技术和多视图立体技术。
长度测量不包括叶柄长度,为确保测量的准确性,需要移除叶柄,因此叶柄被手动移除。
对于关键点 ,如果研究对象的叶形为针形或细长形,叶柄位于叶点云的膨胀处,可以使用边界框技术直接获取交点作为 进行长度测量,从而消除了手动选择关键点 的问题。然而,由于茄子叶形状的特殊性 ,仍需手动选择。
叶参数对植物生长和发育等活动有深远影响,因此本文关于 3D 叶点云长度和宽度的测量结果具有实际意义。
Author Contributions
Funding
这项研究由“温室集群控制系统研究与开发”项目资助,项目编号为“s20163081109”。
Acknowledgments
Conflicts of Interest
Abbreviations
| 3D | three-dimensional |
| RoI | Range of Interest |
| PCA | Principal Component Analysis |
References
- Zhou, L. Studies on Image-Based Plant Leaf Parameter Measurement; Hunan University: Changsha, China, 2015. [Google Scholar]
- Thakur, S.; Bawiskar, S.; Singh, S.K.; Shanmugasundaram, M. Autonomous Farming–Visualization of Image Processing in Agriculture. In Inventive Communication and Computational Technologies; Springer: Singapore, 2020. [Google Scholar]
- Lu, S.; Guo, X.; Li, C. Research on Techniques for Accurate Modeling and Rendering 3D Plant Leaf. J. Image Graph. 2009, 14, 731–737. [Google Scholar]
- Hui, F.; Zhu, J.; Hu, P.; Meng, L.; Zhu, B.; Guo, Y.; Li, B.; Ma, Y. Image-based dynamic quantification and high-accuracy 3D evaluation of canopy structure of plant populations. Ann. Bot. 2018, 121, 1079–1088. [Google Scholar] [CrossRef] [PubMed]
- Wu, L.; Long, Y.; Sun, H.; Liu, N.; Wang, W.; Dong, Q. Length Measurement of Potato Leaf using Depth Camera. IFAC Pap. 2018, 51, 314–320. [Google Scholar]
- Li, Y.; Zhang, H.; Yang, Y. A method for obtaing ing plan morphological phenotypic parameters using image processing technology. J. For. Eng. 2020, 5, 128–136. [Google Scholar]
- Xiao, S.; Chai, H.; Shao, K.; Shen, M.; Wang, Q.; Wang, R.; Sui, Y.; Ma, Y. Image-Based Dynamic Quantification of Aboveground Structure of Sugar Beet in Field. Remote Sens. 2020, 12, 269. [Google Scholar] [CrossRef] [Green Version]
- Elnashef, B.; Filin, S.; Lati, R.N. Tensor-based classification and segmentation of three-dimensional point clouds for organ-level plant phenotyping and growth analysis. Comput. Electron. Agric. 2019, 156, 51–61. [Google Scholar] [CrossRef]
- Wu, S.; Wen, W.; Xiao, B.; Guo, X.; Du, J.; Wang, C.; Wang, Y. An Accurate Skeleton Extraction Approach from 3D Point Clouds of Maize Plants. Front. Plant Sci. 2019, 10, 248. [Google Scholar]
- Xiang, L.; Bao, Y.; Lie, T.; Ortiz, D.; Salas-Fernandez, M.G. Automated morphological traits extraction for sorghum plants via 3D point cloud data analysis. Comput. Electron. Agric. 2019, 162, 951–961. [Google Scholar]
- Liang, M. Design and Implementation of Image Software Based on Mobile Terminal for Parameters Measurement of Plant Leaf; Hunan University: Changsha, China, 2018. [Google Scholar]
- Chen, A.; Li, D.; Dong, G. A system for plant leaf parameter measure based on MATLAB. J. China Univ. Metrol. 2010, 21, 310–313. [Google Scholar]
- Rouphael, Y.; Mouneimne, A.H.; Ismail, A.; Gyves, M.D.; Rivera, C.M.; Colla, G. Modeling individual leaf area of rose (Rosa hybrida L.) based on leaf length and width measurement. Photosynthetica 2010, 48, 9–15. [Google Scholar] [CrossRef]
- Shi, P.; Liu, M.; Yu, X.; Gielis, J.; Ratkowsky, D.A. Proportional Relationship between Leaf Area and the Product of Leaf Length and Width of Four Types of Special Leaf Shapes. Forests 2019, 10, 178. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Xie, T.; Yang, C.; Song, H.; Jiang, Z.; Zhou, G.; Zhang, D.; Feng, H.; Xie, J. Segmenting Purple Rapeseed Leaves in the Field from UAV RGB Imagery Using Deep Learning as an Auxiliary Means for Nitrogen Stress Detection. Remote Sens. 2020, 12, 1403. [Google Scholar] [CrossRef]
- Lu, Y.; Xiao, Z.; Yang, H.; Zhou, Q.; Sun, Y. Rice leaf characteristic parameters measurement system based on Android. J. South Agric. 2019, 50, 669–676. [Google Scholar]
- Li, Y.; Li, Y. Fast Algorithm for Extracting Minimum Enclosing Rectangle of Plant Leaves. J. Jiangnan Univ. Sci. Ed. 2015, 14, 273–277. [Google Scholar]
- Wang, J.; Li, C.; Wang, Q.; Wang, B.; Li, F. The Extraction of Leaves’ Aspect Ratio and Boundary Curvature. J. South China Norm. Univ. Natural Ence Ed. 2013, 1, 42–45. [Google Scholar]
- Yuan, W.; Hu, D. Measurement of leaf blade length and width based on moment. Comput. Eng. Appl. 2013, 49, 188–191. [Google Scholar]
- Xiang, Y.; He, Y.; Wei, Y.; Liang, H.; Guo, B. Algorithm for Minimum Bounding Rectangle of Fast Extracting Leaves. Comput. Mod. 2016, 2, 58–61. [Google Scholar]
- Guo, S.; Zhou, L.; Wen, H. Image-based length measurement method of axially symmetric plant leaves with elongated petiole. J. Electron. Meas. Instrum. 2015, 29, 866–873. [Google Scholar]
- Wang, H.; Zhu, D.; Guo, H.; Ma, Q.; Su, W.; Su, Y. Automated calculation of heart girth measurement in pigs using body surface point clouds. Comput. Electron. Agric. 2019, 156, 565–573. [Google Scholar]
- Guo, H.; Ma, X.; Ma, Q.; Wang, K.; Su, W.; Zhu, D. LSSA-CAU: An interactive 3d point clouds analysis software for body measurement of livestock with similar forms of cows or pigs. Comput. Electron. Agric. 2017, 138, 60–68. [Google Scholar]
- Zhou, Y.; Xue, H.; Wang, C.; Jiang, X.; Gao, X.; Bai, J. Reconstruction and Body Size Detection of 3D Sheep Body Model Based on Point Cloud Data. In Proceedings of the International Conference on Computer and Computing Technologies in Agriculture, Jilin, China, 12–15 August 2017; pp. 251–262. [Google Scholar]
- Zhang, X.; Liu, G.; Jing, L.; Si, Y.; Ren, X.; Ma, L. Automatic Extraction Method of Cow’s Back Body Measuring Point Based on Simplification Point Cloud. Trans. Chin. Soc. Agric. Mach. 2019, 50, 267–275. [Google Scholar]
- Li, X.; Chen, M. Algorithm for Extracting End Feature Point of 3D Human Body Model Using Point Cloud Data. In Proceedings of the 2012 International Academic Conference of Art Engineering and Creative Industry(IACAE 2012), Fuzhou, China, 13 October 2012; pp. 20–25. [Google Scholar]
- Liu, T.; Peng, X.; Tan, X. Method of Automatic Measurement of Human Size Based on Depth Camera. J. Chin. Comput. Syst. 2019, 40, 2202–2208. [Google Scholar]
- Tan, X.; Peng, X.; Liu, L.; Xia, Q. Automatic human body feature extraction and personal size measurement. J. Vis. Lang. Comput. 2018, 47, 9–18. [Google Scholar] [CrossRef]
- Zhang, W.; Kong, D.; Wang, S.; Wang, Z. 3D human pose estimation from range images with depth difference and geodesic distance. J. Vis. Commun. Image Represent. 2019, 59, 272–282. [Google Scholar]
- Song, P.; Yang, Z. The Application of 3D Laser Scanning Technology in Earthwork Calculation of High and Steep Slope. Urban Geotech. Investig. Surv. 2019, 2, 63–65. [Google Scholar]
- Yan, H.; Zhu, B.; Wang, J. Application of Unmanned Airborne LIDAR in Mountain Water Conservancy Mapping. Mod. Surv. Mapp. 2019, 42, 48–50. [Google Scholar]
- Maria, V.C.; Jeffrey, B.E. Image-based phenotyping and genetic analysis of potato skin set and color. Crop Sci. 2020, 60, 202–210. [Google Scholar]
- Wang, J.; Zhang, Y.; Gu, R. Research Status and Prospects on Plant Canopy Structure Measurement Using Visual Sensors Based on Three-Dimensional Reconstruction. Agriculture 2020, 10, 462. [Google Scholar] [CrossRef]
- Zhou, L.; Gu, X.; Cheng, S.; Yang, G.; Shu, M.; Sun, Q. Analysis of Plant Height Changes of Lodged Maize Using UAV-LiDAR Data. Agriculture 2020, 10, 146. [Google Scholar] [CrossRef]
- Guo, C.; Zong, Z.; Zhang, X.; Liu, G. Apple tree canopy geometric parameters acquirement based on 3D point clouds. Trans. Chin. Soc. Agric. Eng. 2017, 33, 175–181. [Google Scholar]
- Gongal, A.; Karkee, M.; Amatya, S. Apple fruit size estimation using a 3D machine vision system. Information Processing in Agriculture. Inf. Process. Agric. 2018, 5, 498–503. [Google Scholar]
- Yang, H.; Wang, X.; Sun, G. Three-Dimensional Morphological Measurement Method for a Fruit Tree Canopy Based on Kinect Sensor Self-Calibration. Agronomy 2019, 9, 741. [Google Scholar]
- Zhang, Y.; Teng, P.; Shimizu, Y.; Hosoi, F.; Omasa, K. Estimating 3D Leaf and Stem Shape of Nursery Paprika Plants by a Novel Multi-Camera Photography System. Sensors 2016, 16, 874. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Feng, Q.; Chen, J.; Li, C.; Fan, P.; Wang, X. Measurement Method of Vegetable Seedling Leaf Morphology Based on Photometric Stereo. Trans. Chin. Soc. Agric. Mach. 2018, 49, 43–50. [Google Scholar]
- Zhang, Y.; Wang, X.; Sun, G.; Li, Y.; Sun, X. Leaves and Stems Measurement of Plants Based on Laser Vision in Greenhouses. Trans. Chin. Soc. Agric. Mach. 2014, 45, 254–259. [Google Scholar]
- Itakura, K.; Hosoi, F. Automatic Leaf Segmentation for Estimating Leaf Area and Leaf Inclination Angle in 3D Plant Images. Sensors 2018, 18, 3576. [Google Scholar] [CrossRef] [Green Version]
- Hu, C.; Pan, Z.; Li, P. A 3D Point Cloud Filtering Method for Leaves Based on Manifold Distance and Normal Estimation. Remote Sens. 2019, 11, 198. [Google Scholar]
- Removing Outliers Using a Conditional or RadiusOutlier Removal. Available online: https://pcl.readthedocs.io/projects/tutorials/en/latest/remove_outliers.html (accessed on 24 June 2020).
- Smoothing and Normal Estimation Based on Polynomial Reconstruction. Available online: https://pcl.readthedocs.io/projects/tutorials/en/latest/resampling.html (accessed on 3 July 2020).
- Principal Component Analysis. Available online: https://www.mathworks.com/help/stats/principal-component-analysis-pca.html (accessed on 12 August 2020).
- Li, W.; Liu, C. Research on Improved PCA-based ICP Point Cloud Registration Algorithm. Ind. Control. Comput. 2020, 33, 11–13. [Google Scholar]
- Zhang, R.; Li, G.; Li, M.; Wang, S. Classification of LiDAR Point Clouds Based on PCA-BP Algorithm. Bull. Surv. Mapp. 2014, 7, 23–26. [Google Scholar]
- Dimitrov, D.; Knauer, C.; Kriegel, K.; Rote, G. Bounds on the quality of the PCA bounding boxes. Comput. Geom. 2009, 42, 772–789. [Google Scholar] [CrossRef] [Green Version]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef] [Green Version]
- Yan, W.; Wu, W. Data Structure (C Language Edition); Tsinghua University Press: Beijing, China, 2011; pp. 186–192. [Google Scholar]
- Du, P.; Tu, C.; Wang, W. Computing Geodesics on Point Clouds. J. Comput. Aided Des. Comput. Graph. 2006, 3, 438–442. [Google Scholar]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Chen, Y.; Zhang, X.; Gong, W. Research on Measurement Method of Leaf Length and Width Based on Point Cloud. Agriculture 2021, 11, 63. https://doi.org/10.3390/agriculture11010063
Wang Y, Chen Y, Zhang X, Gong W. Research on Measurement Method of Leaf Length and Width Based on Point Cloud. Agriculture. 2021; 11(1):63. https://doi.org/10.3390/agriculture11010063
Chicago/Turabian StyleWang, Yawei, Yifei Chen, Xiangnan Zhang, and Wenwen Gong. 2021. "Research on Measurement Method of Leaf Length and Width Based on Point Cloud" Agriculture 11, no. 1: 63. https://doi.org/10.3390/agriculture11010063
APA StyleWang, Y., Chen, Y., Zhang, X., & Gong, W. (2021). Research on Measurement Method of Leaf Length and Width Based on Point Cloud. Agriculture, 11(1), 63. https://doi.org/10.3390/agriculture11010063

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}